Cybercrime is continuously increasing in many dimensions including the number and types of incidents, the range of applications and infrastructures being attacked, the complexity and sophistication of attack malware and so on. Moreover the complexity of the communication network applications and infrastructure technology is also constantly evolving creating new attack vectors and threats. Cyber defenders are engaged in an ongoing arms race to keep abreast of attackers and constantly need new approaches and innovations to aid them in their struggle.
Our research seeks new solutions to aid defenders and is centred on strands
Cybersecurity teams work through steps or processes as outlined in the NIST Cybersecurity Framework below which Artificial Intelligence for Cyber Operations shows the 5 main steps (and subparts) of the security operation lifecycle.
can help to improve many aspects of this process including:
• Discovering new vulnerabilities.
• Improve detection of malware and anomalous activity and multistage attacks.
• Reacting and adapting to an adversary’s actions. This includes reasoning about those actions and what they mean in the context of the attack and the environment.
• AI for Security Orchestration, Automation and Response, (SOAR ) or AIOps (AI for IT Operations) for cybersecurity. AIOps combines big data and machine learning to automate IT operations processes its application is as seen in the following diagram (from Gartner). There are many potential areas for the application of AI in this flow.
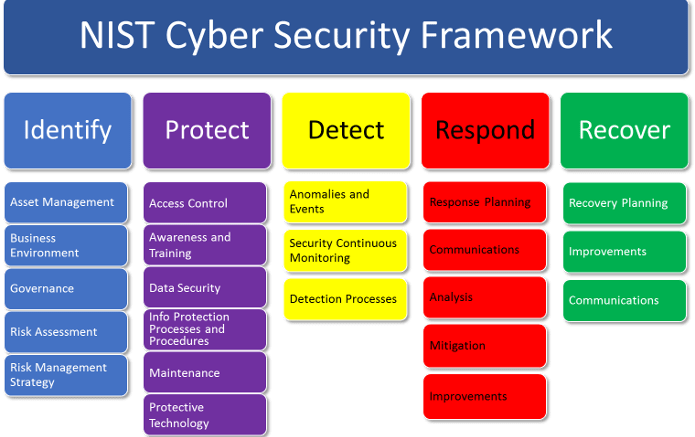

Our research addresses all phases of the framework with most focus on the Detect phase.
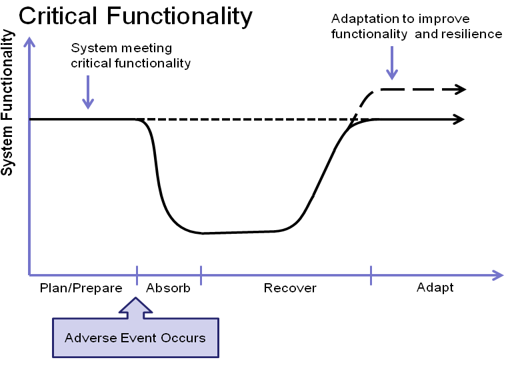
Cyber resilience is the ability to prepare for, absorb, recover from, and adapt to, attacks, or compromises on systems that use or are enabled by cyber resources It is intended to enable an organisation achieve its mission or business objectives in face of an attack see the diagram below. Resilience is related to the beginning and end stages of the Cyber Security Framework we are interested primarily in the Plan and Recover phases. In the planning phase we are interested in model-based assessment of cyber resilience. Model-based approaches focus on a representation of the real world and a definition of resilience using mathematical or physical concepts. Modeling requires knowledge of the critical functions of a system, mission, the temporal patterns of a systems, thresholds, and system memory and adaptation. Current areas of interest include the use of: • Cyber security Digital Twins for modelling IT/OT security overlaps • Serious games e.g., for business continuity and disaster recovery planning. For the recovery phase we are interested to explore the context/mission aware led response mechanisms to ensure the optimal response. Techniques of interest include the use of: • Moving Target Defence (MTD) for IIoT environments • AI based learned responses e.g., through emulation • Intention based networking frameworks adapted to cyber resilience • Adaptive access control
The booming of Internet of Things (IoT), machine learning, intelligent agents / robots / vehicles, industry 4.0 / 5.0 requires to deploy distributed artificial intelligence (AI) / robotic / vehicular applications across the Internet by exploring the capabilities of the devices, edge and cloud, gathering information from a large number of sensors and making decision to control the actuators. Some applications may require real-time or near real-time control. To facilitate the application deployment, the networking / computing / storage resources at the edge need to be coordinated, a programming model is required to compose the large amount of resources, and finally the deployed applications need to be adapted to the underlying resources. The research directions are shown in the diagram, which contain 3 strands. Our research seeks new solutions to aid defenders and is centred on strands

This strand design and develop protocols and platforms to coordinate the heterogeneous edge resources owned by different stakeholders, leveraging different technologies, e.g. Time-Sensitive Networking (TSN), Information-Centric Networking (ICN), Software Defined Networking (SDN), Network Function Virtualisation (NFV), and Blockchain. This strand will design decentralised autonomous service provisioning systems, proofs for the resource and service usages, and as well as the correspondent payment mechanisms and business models for edge environments. It will also perform research on enhancing the performance of the existing decentralised systems, e.g. the scalability and networking performance for Ethereum.
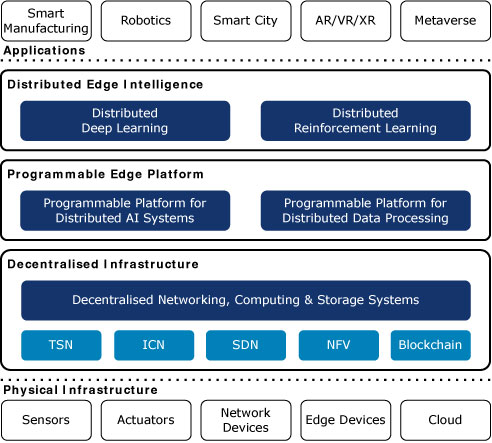
1) Programmable Platform for Distributed AI Systems Distributed AI systems will consist of multiple distributed machine learning algorithms to fulfil user defined tasks, e.g. video surveillance systems may use distributed deep learning algorithms to extract features and detect objects and use distributed reinforcement learning to control cameras’ movements for object tracking. The trained parameters or detected objects can be transferred to a different video surveillance systems in another area or accessed by higher level decision making systems. This research will develop programming models to rapidly express and deploy AI systems.
2) Programmable Platform for Distributed Data Processing Internet of Things (IoT) will include a huge number of embedded devices and generate enormous amount of data which will be consumed/processed by different users. A new approach is required to support this many-to-one/many-to-many communication model to reduce the traffic volume in the network. This research will develop a programmable IoT framework so that IoT applications can be easily programmed and deployed across IoT devices, network, edge, and cloud, and the sensory data can be efficiently processed and aggregated by the application logic. Both batch and streaming data processing will be considered in the research.
1) Distributed Deep Learning The current deep learning training methods are primarily designed for running in a data centre or across a few data centres where the network connections are normally very stable with high throughput. In edge computing scenarios, transmitting data generated by things/edge devices to the central cloud will create performance bottlenecks in the cloud as well as possibly violate the privacy constrains of the edge devices. This strand focuses on develop a scalable distributed training and inferencing system for deep neural networks in Edge computing environments.
2) Distributed Reinforcement Learning Reinforcement Learning is about taking actions in an environment to maximize cumulative reward. Traditional reinforcement learning has difficulties in learning from multiple independent agents in terms of significant communication costs between agents. This strand focuses on develop a scalable distributed reinforcement learning system for edge computing environments so that the autonomous agents at the edge can interact with others to reach a shared goal.
Customisable production is an emerging trend in smart manufacturing. Adaptive and reconfigurable robotics is essential to meet this flexibility requirements. Current industrial robot programming work is very time consuming and requires high changeover time for new products or features. The programmes are also not robust in dealing with exceptions and errors. The research aims to design and develop flexible, adaptive and trusted robotic control and multi-robot coordination solutions with AI, IoT, blockchain and advanced perception technologies. The research can be divided into the following strands.

1) Composable AI for Robot Control
The research objective contains two folds, i.e. supporting diverse robotic tasks with the same robotic system and reacting to changes autonomously without human intervention, and complete the same task with different types of robotic systems. This will enable configurable work cells and manufacturing lines, faster integration time, reusable robotic systems, reduced factory footprint, high-mix and low-volume productions, and reduced robot programming costs. Knowledge modularisation algorithms will be developed so that the knowledge modules representing different Autonomous Mobile Robots (AMR) / Robotic Arms / Grippers / Tasks are composable. Advanced sensors, e.g. 3D cameras, will be employed to enhance the robot control.
2) AI based Robotic Task Decomposition and Planning
A robot may need to complete a complicated task in various scenarios, e.g. pick a package, move to a pallet and place it on the pallet. The research objective is to develop a reinforcement learning based framework to support automatic task decomposition and planning, including task description to specify the requirements for the robots to plan the task and evaluate the completeness level, automatic task activities decomposition and refining the decomposition solution according to the task/environment changes, and complete the planned tasks with specific AI models.

1) AI based Multi-robot Collaboration
The research objective is to develop a reinforcement learning framework to enable multi-robot collaboration where each robot has a partial observation to the environment. The learning framework will consider the uncertainties caused by different factors, e.g. the environment, the outcomes of the actions, and the robots. One challenge is to minimize the exchanged states between robots and at the same maximize the specific task goal through joint actions for the robots. This research will also develop a reinforcement learning framework for enable learning to communicate for intelligent interactions in multi-robot collaboration scenarios. The framework will support adaptive learning and communicating with different robots. The collaboration between Autonomous Mobile Robots, robotic arm top modules, and fixed robotic arms will be the main target scenarios.
2) Trusted Multi-robot Collaboration System
The objective is to design and develop trustworthy robotic system for control and collaboration of multiple robots and Swarm Robots in unreliable and untrusted environments, e.g. robots with noisy sensors or being hacked. The trustworthy system design involves two levels, i.e. in the individual robot level where the robot can detect malfunctional components and perform the task in a trustworthy way, and in the multi-robot level where the robot group can detect malfunctioning individual robots and react accordingly. Secure task deployment and execution and trustworthy robot coordination are the foundation of the system. This research strand will also explore the possibilities to record the robot behaviour and the causes, such that the trustiness can be improved through simulation in the digital twins (or metaverse) of the robotic systems.
The Software Research Institute (SRI) is collaborating with the Material Research Institute (MRI) and the Bioscience Research Institute (BRI) at TUS to conduct cross-discipline research. Example work includes setting up an Industry 4.0 (end-to-end injection moulding production process) and Autonomous Mobile Robot (AMR) testbeds for industry partners to “test before invest”, developing machine learning algorithms for automatic identification of plastics and polymer materials based on Fourier Transform Infra-Red (FTIR) Spectra, using machine learning algorithms to analyse Flow Cytometry data for immune cell response classification and identification and bioactive determinant prediction, evaluating blockchain for fish and seafood supply chain management, using edge computing / AI / robotic / AR / VR technologies for digital transformation of peatland.